Problem 18: Mixture of Gaussians - A Soft Classification Approach (ft. Jensen’s Inequality)
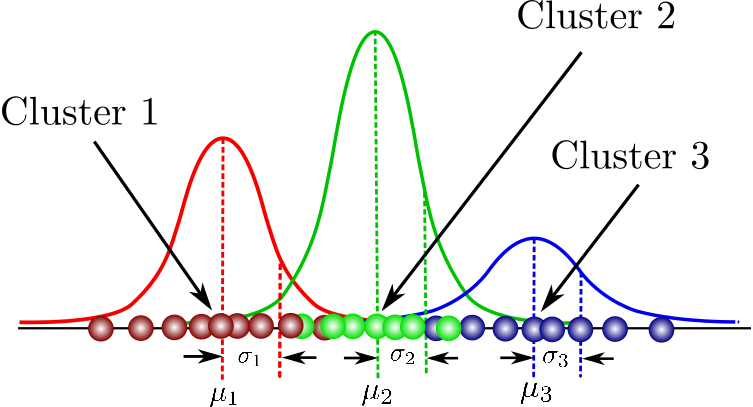
The Bayesian framework for solving problems has already turned into a phenomenon. A hard classification approach like the K-means algorithm does not let you discuss about uncertainty or certainty with which you can say that a data point belongs to a specific class/group. This calls for a probabilistic approach and the Gaussian Mixture Model (GMM) which has been around for more than three decades.
- Obtain a lower bound for the Likelihood : To do this we introduce a new distribution (q) over the latent variable \( t_{i} \) which would help us tweak a lower bound of the objective function so that we can minimize the difference between the lower bound and the objective function. The fact that direct optimization of the objective function is hard motivates us to go for something like this. The distribution (q) is added in a clever manner by rewriting our objective and employing the Jensen's Inequality : $$ \begin{aligned} \log \left(P\left(x_{i} \mid \Theta\right)\right) &=\log \left(\sum_{j=1}^{K} P\left(x_{i} \mid t_{i}=j, \Theta\right) P\left(t_{i}=j \mid \Theta\right)\right) \\ &=\log \left(\sum_{j=1}^{K} P\left(x_{i}, t_{i}=j \mid \Theta\right)\right) \\ &=\log \left(\sum_{j=1}^{K} \frac{q\left(t_{i}=j\right)}{q\left(t_{i}=j\right)} P\left(x_{i}, t_{i}=j \mid \Theta\right)\right) \\ &=\log \left(\sum_{j=1}^{K} q\left(t_{i}=j\right) \frac{P\left(x_{i}, t_{i}=j \mid \Theta\right)}{q\left(t_{i}=j\right)}\right) \end{aligned} $$ $$ \log \left( P\left(x_{i} \mid \Theta\right) \right) =\log \left(\sum_{j=1}^{K} q\left(t_{i}=j\right) \frac{P\left(x_{i}, t_{i}=j \mid \Theta\right)}{q\left(t_{i}=j\right)}\right) \geqslant \sum_{j=1}^{K} q\left(t_{i}=j\right) \log \left(\frac{P\left(x_{i}, t_{i}=j \mid \Theta\right)}{q\left(t_{i}=j\right)}\right)=L_{i}(\Theta, q) $$ Note that the overall objective function is the sum of \( P\left(x_{i} \mid \Theta\right) \) over all i data points.
- E-Step : Minimizing the difference between the lower bound and the actual objective function yields the expression of the distribution q over \( t_{i} \) which can be derived as follows: $$ L_{i}(\Theta, q) - \log \left(P\left(x_{i} \mid \Theta\right)\right) $$ $$ = \sum_{j=1}^{K} q\left(t_{i}=j\right) \log \left(\frac{P\left(t_{i}=j \mid x_{i}, \Theta\right)}{q\left(t_{i}=j\right)}\right) + \sum_{j=1}^{K} q\left(t_{i}=j\right) \log \left(P\left(x_{i} \mid \Theta\right) \right) - \log \left(P\left(x_{i} \mid \Theta\right) \right) $$ $$ = \sum_{j=1}^{K} q\left(t_{i}=j\right) \log \left(\frac{P\left(t_{i}=j \mid x_{i}, \Theta\right)}{q\left(t_{i}=j\right)}\right) $$ The expression above is the KL-divergence between q and \( P\left(t_{i}=j \mid x_{i}, \Theta\right) \) which can be shown to be minimum when \( q = P\left(t_{i}=j \mid x_{i}, \Theta\right) \) Furthermore, using Bayes' Theorem it can be seen that $$ P\left(t_{i} \mid x_{i}, \Theta\right)=\frac{P\left(x_{i} \mid t_{i}=j, \Theta\right) P\left(t_{i}=j \mid \Theta\right)}{P\left(x_{i} \mid \Theta\right)} $$ Replacing the probabilities with respective parameters we have: $$ P\left(t_{i}=j \mid x_{i}, \Theta\right)=\frac{P\left(x_{i} \mid t_{i}=j, \Theta\right) P\left(t_{i}=j \mid \Theta\right)}{\sum_{k=1}^{K} P\left(x_{i} \mid t_{i}=k, \Theta\right) P\left(t_{i}=k \mid \Theta\right)}=\frac{\alpha_{j} N\left(x_{i} \mid \mu_{j}, \Sigma_{j}\right)}{\sum_{k=1}^{K} \alpha_{k} N\left(x_{i} \mid \mu_{k}, \Sigma_{k}\right)} $$ Therefore, we now have a rule to update q each time we update the parameter set \( \Theta \)
- M-step : This essentially involves a parameter update for a given distribution q. I am skipping the full derivation since the update formulae are pretty intuitive. We need to update the weights \( \alpha_{j} \), mean vectors and the covariance matrices. The formulae are given below: $$ \alpha_{j}=\frac{\sum_{i} q\left(t_{i}=j\right)}{\sum_{j^{\prime}=1}^{K} \sum_{i} q\left(t_{i}=j^{\prime}\right)} $$ $$ \mu_{j}=\frac{\sum_{i} q\left(t_{i}=j\right) x_{i}}{\sum_{i} q\left(t_{i}=j\right)} $$ $$ \Sigma_{j}^{T}=\frac{\sum_{i} q\left(t_{i}=j\right)\left(x_{i}-\mu_{j}\right)\left(x_{i}-\mu_{j}\right)^{T}}{\sum_{i} q\left(t_{i}=j\right)} $$